Yazı Tarihi: Ocak 2023
Değerlendirme Yazısı
Kaynak gösterilerek kısmi alıntı yapılabilir.
MORFOLOJİK ÇALIŞMALAR
Deniz tabanının morfolojisi ile ilgili çalışmalarda temel olarak batimetrik sistemler ve yanal tarama sonarı sistemleri kullanılır. Tek ve çok ışınlı batimetri sistemleri, temel olarak deniz tabanının derinliğinin belirlenmesinde kullanılan gelişmiş jeofizik sistemlerdir. Yanal tarama sonarı sistemleri ise, deniz tabanındaki morfolojik değişimlerin ve farklı sediment türleri arasındaki geçişşin belirlenmesinde kullanılmaktadır. Her iki sistem de, yüksek frekanslı akustik sinyaller kullanır.
Deniz tabanı derinliğinin ölçülmesi denizlerdeki temel gözlemlerden birisidir. Derinlik belirlemeleri sonucu elde edilen batimetri, jeoloji ve yer içinin uzun dönemli davranışı ile yakından ilişkilidir. Deniz tabanı morfolojisinin yüksek ayrımlı olarak haritalanması, deniz jeofiziği araştırmalarının da temeli niteliğindedir. Özellikle son yıllarda bu araştırmaların kapsamı, geniş alanlardaki keşif amaçlı çalışmalardan, yerel alanlardaki daha yoğun ve daha ayrıntılı çalışmalara doğru yöneldiğinden, ayrıntılı batimetrik çalışmalar oldukça önem kazanmıştır. Kıyı ötesi mühendislik yapılarının inşasında su derinliği, (geçici bile olsa) denizel sondaj platformlarının, arama ve üretim yapılarının ve denizaltı boru hatlarının başarılı olarak kurulmasında kesin ve doğru olarak bilinmelidir. Birçok kıyı ötesi yapı, belirli su derinlikleri için tasarlanarak yapıldıklarından batimetrideki küçük bir hata ciddi inşa sorunlarına yol açabilir.
Ekosounder sistemleri deniz tabanı derinliğinin (batimetri) ölçülmesinde kullanılan akustik sistemlerdir. Ekosounder sistemiyle yapılan batimetrik çalışmalar, denizel yer-mühendisliği (marine geo-engineering) ve denizel jeoteknik çalışmaların önemli bir parçası konumundadır. Deniz tabanı derinliğinin deniz tabanından yansıyan ses dalgalarının varış zamanlarının ölçülmesiyle bulunabileceği ilk kez 19. yüzyılın başlarında ortaya konulmuş, ancak akustik yöntemler, ucuna ağırlık bağlı halat kullanılarak yapılan geleneksel derinlik ölçümlerinin yerini 1920’ lerde almış ve rutin olarak kullanılır hale gelmiştir. Deniz tabanı derinliğinin belirlenmesinde kullanılan akustik yöntemler son 30 yıl içerisinde büyük gelişme göstermiş, deniz tabanında birkaç metreden birkaç kilometreye uzanan farklı ölçeklerdeki birçok yeni yapı ve oluşumun ortaya çıkarılmasını sağlamıştır.
KITASAL KENARLARIN YAPISI
Genel olarak kıtasal kenarlar, karadan denize doğru olmak üzere, kıta sahanlığı veya şelf (shelf), kıtasal yamaç (continental slope), kıtasal yükselim veya apron (continental rise) ve derin okyanus düzlüğü veya abisal düzlük (abyssal plain) olarak adlandırılan jeomorfolojik birimlerden oluşmaktadır (Şekil 1). Şelf, yamaç ve apronun oluşturduğu kısım ise kıtasal kenar (continental margin) olarak bilinir. Kıtasal kenarlar, jeolojik olarak abisal düzlük kısımlarından farklıdırlar ve karadan denize doğru, kara kütlesinin denizdeki uzantısı olarak dikkate alınmaktadırlar. Kıtasal kenarlar tüm okyanus alanlarının yaklaşık %20’ sini kaplarlar. Bu alanın %36’sını şelfler, %38’ini kıtasal yamaçlar ve %26’ sını ise apron alanları oluşturmaktadır.

Şekil 1. Kıtasal kenarların ana jeomorfolojik elemanları.
Kara ile kıtasal yamaç arasında uzanan, 0-0.7º arasında değişen oldukça düşük eğime sahip sığ bölge kıtasal şelf olarak adlandırılır. Genellikle en çok 200 m su derinlikleri civarında bulunan şelf kırılma noktasında (shelf break), kıtasal yamacın başladığı yerde sona erer (Şekil 1). Şelf alanlarının ortalama genişliği 70 km civarındadır. Şelflerin derinlik ve genişlikleri ile hemen arkalarındaki kara topoğrafyası arasında yakın ilişki mevcuttur. Dağlık alanlarda bulunan şelfler dar ve derin (örneğin Pontid kuşağının hemen kuzeyindeki Karadeniz Türkiye şelfi), ova veya havzaların arkasında bulunan şelfler ise geniş ve sığdır (örneğin Moezyan platformunun hemen güneyindeki kuzeybatı Karadeniz şelfi).
Şelf üzerinde bulunan tortul birimler, son buzul dönemindeki deniz seviyesi değişimlerinden oldukça etkilenmişlerdir. Buzul dönemlerinde (glacial ages) deniz seviyesinin düşmesi ve ara-buzul dönemlerde (inter-glacial ages) ise yükselmesi, şelf topoğrafyasının şekillenmesinde önemli rol oynamıştır. 15000 yıl önce bugünkünden 130 m kadar daha aşağıda olan su seviyesi nedeniyle, bu dönemde şelf tortullarının tamamı su seviyesi üzerinde bulunmakta ve karasal erozyonal olaylardan geniş çapta etkilenmekteydi. Bu dönemde nehirler bugünkü şelf tortullarının üzerinden akmışlar geniş çaplı erozyon meydana getirmişlerdir. Ara-buzul döneminde tekrar yükselen deniz seviyesi ile şelf tortulları deniz suyu altında kalmış, nehirler tarafından açılan bu erozyonal kanalların bir kısmı güncel tortullar tarafından doldurulmaya başlanmıştır. Ayrıca düşük deniz seviyesi dönemlerinde, şelf üzerinden akan nehirler, şelfin dış kısımlarında deltalar oluşturmuşlardır. Bu deltalar günümüz deltalarının bulunduğu bölgelerin daha önlerinde yer almaktadır.
Şelf kırılma noktasından apron kısmına kadar uzanan göreceli olarak yüksek deniz tabanı eğimine sahip bölge kıtasal yamaç olarak adlandırılır (Şekil 1). Taban eğimi genelde derinlikle azalmakta olup, ortalama eğim 6º civarında, nadiren 15º nin üstündedir. Kıtasal yamaçların genişliği 20-100 km arasında değişir ve 1400-3000 m derinliklerdeki aprona kadar uzanır. Kıtasal yamaçların morfolojisini kontrol altında tutan ana işlemler yamaç aşağı kütle hareketleri, kanyon sistemleri ve taban aşınmasıdır. Yamaç eğiminin yüksek olması özellikle bu bölgelerde kayma ve heyelanların geniş çapta oluşmasına olanak tanımaktadır. Her ne kadar yamaç tortullarının mekanik özellikleri, bunların 15º yamaç eğiminde bile durağan olduklarını gösterse de, yüksek ayrımlı jeofizik veriler, yamaç tortullarının 1º den yüksek eğime sahip deniz tabanında bile kaymalar meydana getirebildiğini göstermektedir. Ayrıca yamaç aşağı akan türbidite akıntıları da, yamaç üzerindeki güncel tortulların aşınmasına, kanal veya kanyonların açılmasına ve tortul örtüyü süpürerek temel kayaç yüzleklerinin (outcrops) oluşmasına neden olmaktadır.
Kıtasal yamaç ile derin abisal düzlük arasında yer alan kısım kıtasal yükselim veya apron olarak bilinir (Şekil 1) ve kıtasal yamacın alt kısmı olarak da tanımlanabilir. Genelde yamaç aşağı taşınan tortulların birikmesi sonucu meydana gelmişlerdir ve eğimleri kıtasal yamaçlara göre daha az olup 1-6º arasındadır. Yamaçtan sonraki ana birikme alanı olduğundan, bu bölgedeki pelajik ve türbidite akıntısı kökenli tortul tabakaların kalınlığı oldukça yüksektir. Kıtasal yamaçlar üzerindeki kanyon ve kanal sistemlerinin alt uçları genellikle apronda son bulur ve kanyonlar üzerinden akan türbidite akıntılarının taşıdığı tortullar apron kısmında birikirler. Apron, güçlü taban akıntılarının da bulunduğu bir alandır. Bu nedenle apron kısmında özellikle kontur akıntıları ile taşınan çok geniş çaplı tepeler oluşturan konturit birikimlerine ve yine kontur akıntısı kaynaklı göç eden tortul dalgalarına rastlamak mümkündür.
Okyanusların en derin kısmı abisal düzlük olup, hemen hemen yatay uzanan ve deforme olmamış tabakalı tortul birimlerden meydana gelir (Şekil 1). Tortul birikimi çok yavaş ve genelde pelajiktir. Tortul birimlerin kalınlığı birkaç kilometreyi bulabilir. Okyanus ortası açılma alanları dışında abisal düzlükler genellikle tektonik olarak aktif olmayan bölgelerdir.
BATİMETRİK SİSTEMLER
Günümüzde geniş çapta kullanılan ekosounder sistemlerini tek ışınlı (single-beam) ve çok ışınlı (multi-beam) ekosounderler olmak üzere iki ana gruba ayırmak mümkündür. Tek ışınlı ekosounderler, tek bir ses dalgası ışını ile geminin altındaki deniz tabanı üzerinde dar bir alanı tarayarak, bu alandan yansıyan ses dalgalarını kaydederler ve tek bir profil boyunca batimetrinin elde edilmesini sağlarlar. Çok ışınlı ekosounder sistemleri ise birden fazla ışın hüzmesi kullanarak, sadece geminin altındaki batimetrinin değil, aynı zamanda geminin her iki yanında uzanan deniz tabanının derinliğinin de elde edilmesine olanak tanırlar (Şekil 2). Tablo 1 her iki sistemin genel özelliklerini göstermektedir. Çok ışınlı batimetri sistemlerinin düşey (derinlik) çözünürlüğü çok yüksek olup birkaç santimetre mertebesindedir. Şekil 3 enterpolasyonlu tek ışınlı ve çok ışınlı batimetri sistemleri ile elde edilen batimetrik haritaları karşılaştırmaktadır. Çok ışınlı haritalarda hem düşey hem de yatay çözünürlük çok daha iyidir.
| Sistem | Frekans (kHz) | Uygulamalar |
|---|---|---|
| Tek ışınlı batimetri | 10-40 | • Geminin altındaki su derinliği • 1B profilde gaz kabarcıkları • 2B batimetri |
| Çok ışınlı batimetri | 10-500 | • Bir tarama alanı boyunca su derinliği • Su kolonunda gaz kabarcıkları • 3B batimetri • Deniz tabanının reflektivitesi • Jeolojik haritalama • Sualtı arkeolojisi • Boru hattı denetimi |

Şekil 2. (a) Tek ışınlı ve (b) çok ışınlı batimetri uygulamalarının ve elde edilen verilerin şematik gösterimi (Dondurur, 2018).
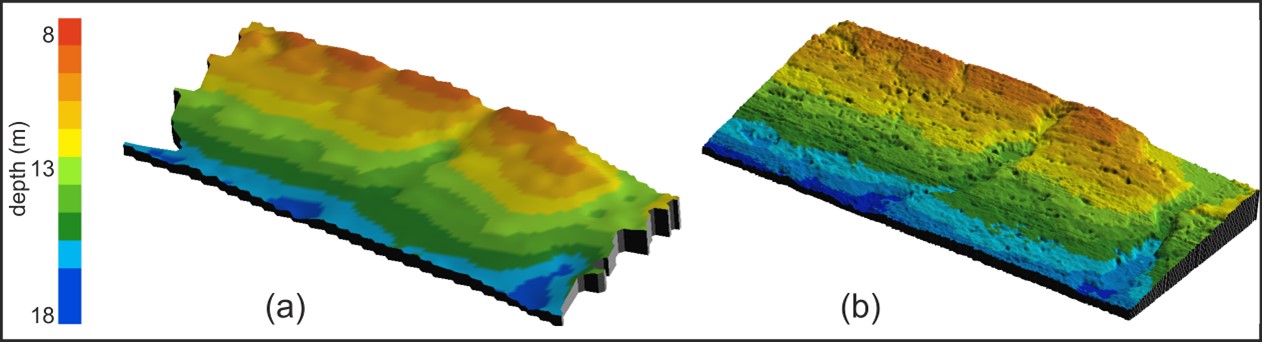
Şekil 3. (a) Tek ışınlı ve (b) çok ışınlı batimetri ile elde edilen örnek bir batimetrik harita. Deniz tabanının tam bir haritasını elde etmek için tek ışınlı veriye enterpolasyon uygulanmıştır (Dondurur, 2018).
Derinlik bilgisine ek olarak, çok ışınlı sistemler, "reflektivite haritası" olarak bilinen yanal taramalı sonar sistemleri ile elde edilen benzer bir görüntü olan deniz tabanı sedimentlerinin morfolojik görüntüsünü de sağlayabilir. Reflektivitenin temel kavramı, farklı yansıtma özelliklerine sahip deniz tabanı sediment türlerini ayırt etmek için, sinyalin varış zamanına ek olarak yansıyan ışının genliğini ölçmek ve kaydetmektir. Yansıma haritaları deniz tabanı sediment tiplerindeki değişimleri ayırt etmek için kullanılabilir ve düşük ve yüksek reflektivite bölgelerini haritalayarak geniş alanların deniz tabanı sediment sınıflandırmasını sağlar.
Modern çok ışınlı sistemler, yalnızca deniz tabanından geri yansıyan ışınların genliklerini değil, aynı zamanda su sütunu içindeki hedeflerden yansıyan genlikleri de kaydeder. Bu tür su sütunu örnekleme özelliği, tortulardan deniz suyuna sızan aktif gazların görüntülerini sağlar. Bu tür noktaların haritalanması ve izlenmesi, petrol ve gaz endüstrisi için inceleme alanının hidrokarbon potansiyeli hakkında çok önemli bilgiler sağlamaktadır.
Çok ışınlı batimetri sistemleri, geniş kıtasal yamaçların ve kanyon sistemlerinin yüksek ayrımlı şekilde haritalanmasını sağlarlar. Örneğin Şekil 4a, Sakarya Kanyonu ve bileşenleri ile marjin boyunca diğer ana morfolojik oluşumları, kanyonun çok ışınlı batimetrik haritası üzerinde göstermektedir. Sakarya Kanyonu, kıtasal şelf alanından, iki kola ayrıldığı 2000 m su derinliğine kadar, kuzey yönünde batimetrik harita üzerinde takip edilebilmektedir. Yakın kısımdaki şelf alanında kanyonun üç farklı girişe (canyon head) sahip olduğu görülmektedir. Şekil 4b ise, batimetri haritasından elde edilen deniz tabanı eğiminin, 3B batimetri verisi üzerindeki görünümünü sunmaktadır. Üst kıtasal yamaçta deniz tabanı eğimlerinin 20° üzerinde olduğu görülmektedir.
Deniz tabanını etkileyen ve tabanda atım oluşturan fay ve çizgisellikler de çok ışınlı batimetri haritalarında belirgin şekilde görülebilir. Şekil 5, örnek olarak İzmir dış körfezindeki deniz tabanında da çizgisellikler oluşturan aktif fayların ve diğer çizgisel unsurların görünümünü örnek olarak vermektedir. Sismik verilerle eş zamanlı toplandığında çok ışınlı batimetri verileri, fayların uzanımının haritalanmasında önemli bilgiler sağlamaktadır.

Şekil 4. (a) Sakarya Kanyon sisteminin eksenlerini ve marjin boyunca diğer ana morfolojik unsurları gösteren çok ışınlı batimetrik harita. Ana kanyonların eksenleri siyah çizgilerle, Sakarya Kanyonu’nun ekseni ve girişleri beyaz çizgilerle gösterilmiştir. (b) Kanyon batimetrisi üzerinde deniz tabanı eğim haritası (Nasıf, 2021).
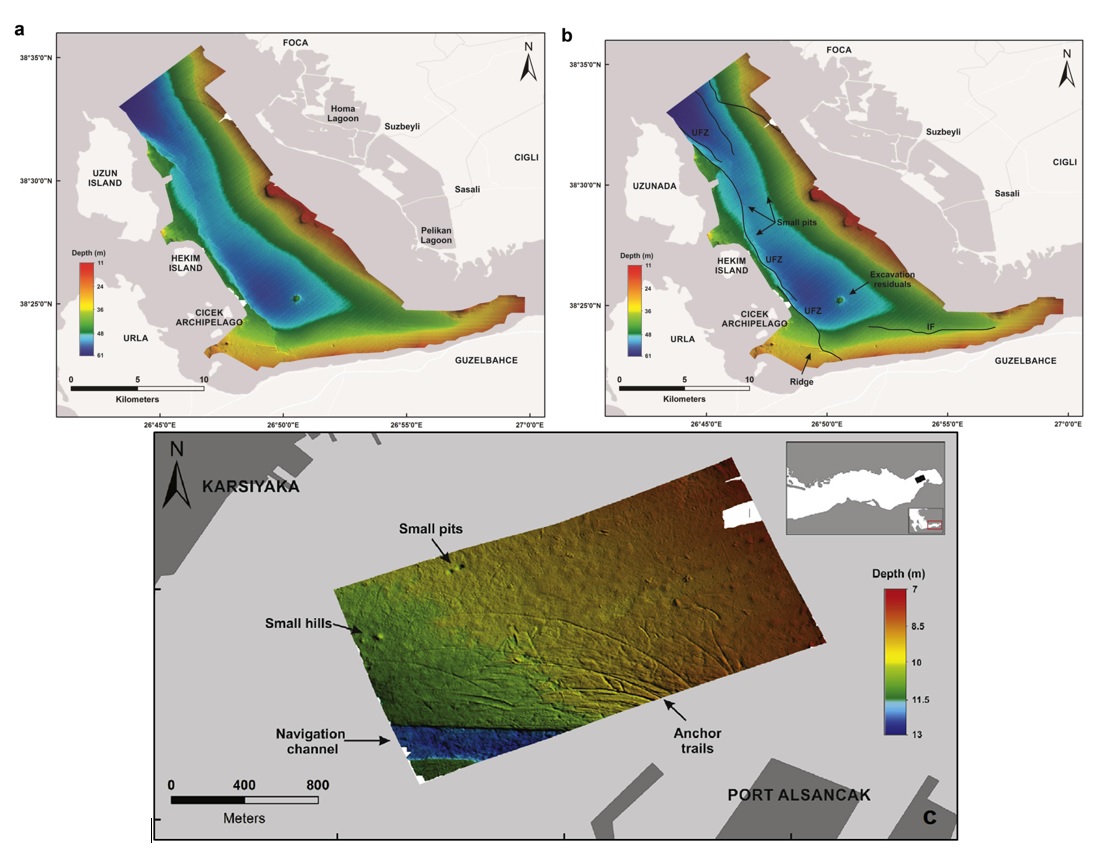
Şekil 5. (a) İzmir Körfezi'nin dış kısmının batimetri haritası, (b) fayların yorumlanmış hali ve (c) Alsancak Limanı çevresindeki navigasyon kanalı ve çapa izleri (Coşkun et al., 2016).
YANAL TARAMA SONARI
Yanal tarama sonarları, gemi hattının her iki yanından yüksek çözünürlüklü deniz tabanı morfoloji bilgisi sağlayan sistemlerdir. Genellikle "sonograflar" olarak adlandırılan sonar verileri, biri iskele tarafı, diğeri sancak tarafı için olmak üzere, derinden çekilen bir tow-fish üzerine monte edilmiş bir transduser çifti kullanılarak elde edilir. Tablo 2 yanal tarama sonar sistemlerinin genel özelliklerini göstermektedir. Bir sonar kaydı, deniz tabanındaki morfolojik değişiklikleri (büyük veya küçük ölçekli kaymalar gibi) ve doğal veya insan yapımı hedefleri (gaz sızıntıları veya boru hatları gibi) belirlemek gibi çeşitli amaçlarla kullanılır.
Şekil 6, yanal tarama sonarı veri toplama ilkesini şematik olarak göstermektedir. Her iki transduser de yatay düzlemde çok dar (yaklaşık 1°) ve düşey düzlemde geniş (yaklaşık 40°) olan tek bir ışın kullanır. Sistem, deniz tabanından çok yüksek çözünürlüklü morfolojik veriler sağlar. Yüksek frekanslı akustik sinyal kullandığından, transduserlerin derinden çekilen tow-fish üzerine, araştırma gemisinin 3B hareketlerinden bağımsız olarak yerleştirilmesi zorunludur. Transduserlerin deniz tabanından belirli bir yükseklikte derinden çekilmesi, sinyalin su kolonu içerisindeki heterojenliklerden daha az etkilenmesini de sağlar.
| Sistem | Frekans (kHz) | Uygulamalar |
|---|---|---|
| Yanal tarama sonarı | 10-1.000 | • Deniz tabanı morfolojisi • Su kolonundaki gaz kabarcıkları • Deniz tabanının reflektivitesi • Jeolojik haritalama • Sualtı arkeolojisi • Su kolonu içindeki hedefler • Boru hattı denetimi |

Şekil 6. Bir yanal tarama sonarı veri toplamasının ve transduserden yayınan kavramsal ışın modellerinin şematik gösterimi (Dondurur, 2018).
Hem iskele hem de sancak transduserleri, sıfır zamanında her iki tarafa da dar bir ışın yayar ve ardından sistem, iletimden hemen sonra her iki transdusere gelen tüm genlikleri kaydetmeye başlar. Yayılan her ışın, kayıt sırasında transduserler tarafından da algılanır ve "çıkış sinyali" adı verilen sıfır zamanda son derece yüksek genlikli bir giriş oluşturur. Ardından ışınlar, tow-fish’in her iki yanındaki transduserlerden uzağa doğru hareket etmeye başlar. İlk anlamlı geri dönüş, genellikle deniz tabanından tow-fish’e en yakın noktadandır. Sinyalin deniz tabanına gidiş gelişi, tow-fish’in deniz tabanından olan yüksekliğine bağlı olarak biraz zaman alacağından çıkış sinyali ve deniz tabanı yansıması arasında boş bir bölge olacaktır. Bu süre, sonar sinyalinin su kolonu boyunca deniz tabanına gitmesi ve oradan tow-fish’e geri dönmesi için geçen süreye karşılık gelir. Bu boş bölge, Şekil 6'da "su sütunu (water column)" ile gösterilir. Bu boş bölgenin ardından transduserlere deniz tabanı dönüşü ulaşacaktır. Bundan sonra, deniz tabanının aşamalı olarak uzak noktalarından gelen geri dönüşler, transduserler tarafından art arda alınır. Geri dönen genlikler, her iki taraf için de yedekten tek yön mesafesine çevrildikten sonra, sıfır zamanından başlayarak kaydın sonuna kadar kaydedilir. Kaydın başlangıç zamanı, sıfır zamanı, transdüserlerin yedek balığın her iki yanında ışınları yaydığı zamandır. Maksimum kayıt mesafesi "sonar menzili" olarak adlandırılır. Şekil 7, bir sonar tow-fish’ini ve kumlu bir deniz tabanında küçük ölçekli kayalar içeren bir sığ su sonar kaydını göstermektedir.

Şekil 7. (a) Bir sonar tow-fish’i ve (b) kumlu bir deniz tabanındaki küçük ölçekli kayaları gösteren sonar kaydı. Sonar frekansı 455 kHz'dir ve sonarın maksimum sinyal erimi her iki tarafta 50 m'dir (Dondurur, 2018).
Sonar tow-fish’ine geri dönen sinyal, yansıma değil "geri saçılım" olarak adlandırılır ve deniz tabanındaki sediment parçacıklarının pürüzlülüğü nedeniyle geri saçılan enerjiden oluşur. Bu pürüzlülük, enerjiyi tow-fish yönü de dahil olmak üzere tüm yönlere dağıtan bir kırınım aracı görevi görür. Transduserlerden yayılan enerjinin çoğu, yansıma açısı geliş açısına eşit olduğundan, tow-fish yönünden uzağa yansıtılır. Ancak, tow-fish’e geri dönen, transduserler tarafından algılanan ve sonar kayıt ünitesi tarafından kaydedilen bir miktar geri saçılan enerji her zaman olacaktır. Geri saçılımın genliği, sonar sistemi tarafından alınan ve kaydedilen ana bilgidir ve deniz tabanı çökellerinin bileşimine bağlı olarak tabandaki pürüzlülük ile orantılıdır. Örneğin, düşükten yükseğe doğru bir sediment pürüzlülük sırası kil, siltli kil, silt, siltli kum, ince kum ve kaba kum olabilir. Bu nedenle, bu farklı sediment bileşimlerinin her biri tow-fish’e farklı miktarda enerji saçar ve bu nedenle sonograflarda farklı gri tonlarda görünür.
Her bir sinyal taraması bir "ping" olarak adlandırılır. Sonograflar, tow-fish rotası boyunca birbirini izleyen çok sayıda ping’den oluşur ve deniz tabanı geri saçımı, geri dönen sinyalin genliğiyle orantılı olan gri tonlardan oluşan haritalar olarak gösterilir. Genellikle 8 bitlik gri tonlamalı haritalama kullanılır, bu da siyah ve beyaz arasında 256 farklı gri ton kullanmamızı sağlar. Genel olarak, yüksek genlikli bir geri dönüş (yani yüksek geri saçılma) siyah olarak gösterilir veya bunun tersi de geçerlidir. Deniz tabanında pozitif rölyefe sahip hedefler, sinyalin hedeflerin arkasına geçmesini engelleyerek genliksiz bir gölge bölgesi oluşturarak hedefleri ve deniz tabanından yüksekliklerini ayırt etmemizi sağlar. Uygulamada, sonar verileri, belirli bir örtüşme miktarıyla (örneğin, sonar eriminin %10'u) birkaç paralel hat boyunca toplanır. Araştırmanın sonunda, bu paralel hatlar deniz tabanının "sonar mozaiği" adı verilen büyük bir reflektivite haritası oluşturmak üzere birleştirilir.
Şekil 8, Karadeniz’in derin sularından alınmış bir sonar mozaiğini göstermektedir. Mozaik üzerinde belirli noktalardaki gaz çıkışları, şekil üzerinde ayrı sonar kayıtlarında görülmektedir. Sonar kayıtlarında, su kolonuna gaz çıkışları da geri saçınım olarak görülürler ve genellikle su kolonu kısmındaki hiperbolik yansımalar olarak ayırt edilirler.

Şekil 8. Örnek bir yanal tarama sonarı mozaiği. Yüksek geri saçınım siyah renkle gösterilmiştir. Yakınlaştırılmış görüntüler su kolonundaki gaz çıkışlarını göstermektedir (Özel et al., 2022).
KAYNAKLAR
Coşkun, S., Dondurur, D., Çifçi, G., Aydemir, A. and Drahor, M.G., 2016. Natural and anthropogenic submarine morphologies revealed by high resolution acoustic data in the Gulf of Izmir, western Turkey, Marine and Petroleum Geology, 71, 211-224.
Dondurur, D., 2018. Acquisition and Processing of Marine Seismic Data, Elsevier Science Publishing Co., 608 pages, ISBN 9780128114902.
Nasıf, A., 2021. Sakarya Kanyonu Morfolojisi, Türkiye' nin Ekstrem Deniz Ortamları, Hüseyin Öztürk, Güler Alkan, Editör, Türk Deniz Araştırmaları Vakfı (TÜDAV), İstanbul, ss.139-160.
Özel, Ö., Dondurur, D. and Klaucke, I., 2022. Seismic and geoacoustic evidence for subsurface fluid-flow and seepage offshore Akçakoca, South-Western Black Sea, Turkey, Geo-Marine Letters, 42: 17.